
Motivation
- Most imitation-learning approaches to anomaly detection rely only on vessel trajectories.
- Without environmental context, hazard-avoidance maneuvers are often misclassified as anomalies.
- By enhancing imitation-learning–based anomaly detection with environmental context (e.g., wind, waves), the model can better distinguish unsafe vessel actions from safe, weather-driven detours.
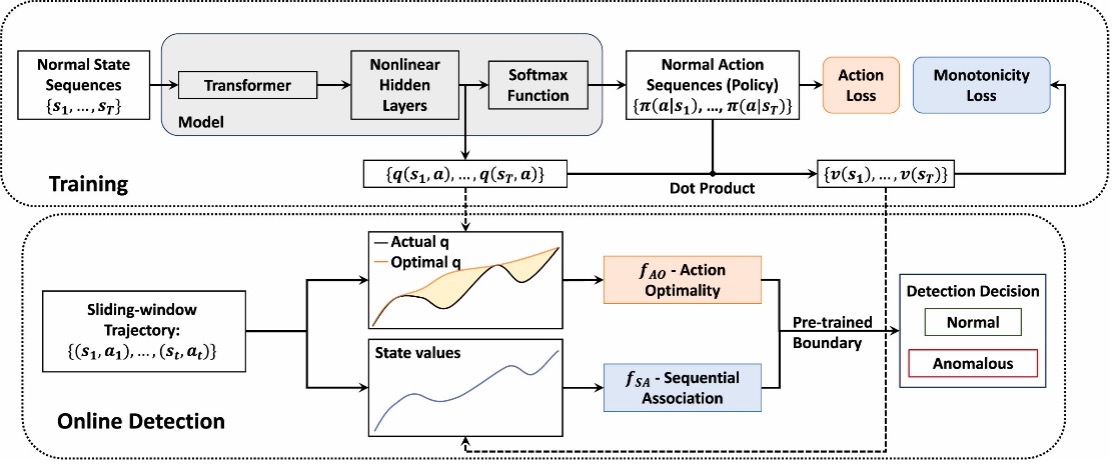
Methodology
- Redefine the imitation-learning state space to include ERA5 environmental variables.
- Train policies on normal trajectories under environmental context.
- Evaluate with hazard-injection scenarios to test decision robustness.
Contribution (Expected)
- Hazard-injection evaluation pipeline for imitation learning under weather impact.
- Framework showing how enriched state representations improve risk-sensitive imitation learning for anomaly detection